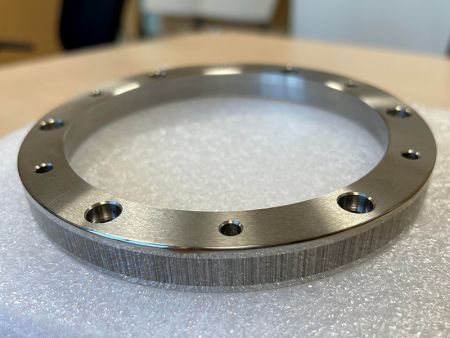
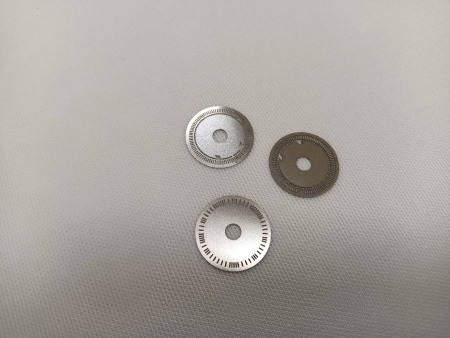
不鏽鋼圓盤光柵尺 輪轂光柵尺
京碼從不鏽鋼原材客製打造,結合精密機械加工及激光雷射製程,以獨門微蝕刻專利技術打造精密量測標線,能夠精準量測,提高正確性。圓盤光學尺應用於精準圓周運動之位置控制,包含:精密工具機、AC...
細節

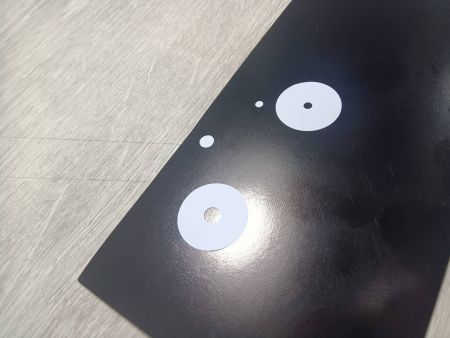
薄膜之深紫外激光雷射微切割及微鑽孔
薄膜材料是指厚度介於單原子到幾毫米間的薄金屬及有機物層,薄膜技術主要應用於半導體功率元件和光學鍍膜。本案是利用薄膜厚度之特質,其切割尺寸具高穩定性,亦利用雷射冷加工之高精度特性,來精準定位,執行微切割及微鑽孔。
細節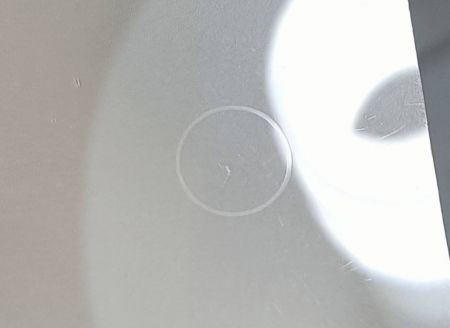
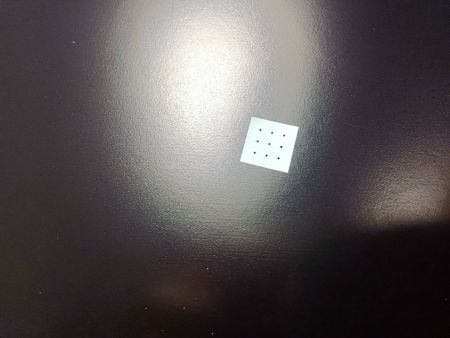
飛秒/皮秒 DUV 深紫外大功率激光雷射 - 聚碳酸脂之冷加工微蝕刻
京碼利用其開發之 DUV 雷射機台,成功於聚碳酸脂(PC材料)薄膜上雷射微蝕刻出線路,而不傷害材料。其他種雷射因會產生焦黑,而不適合用來於聚碳酸脂微蝕刻電路。
細節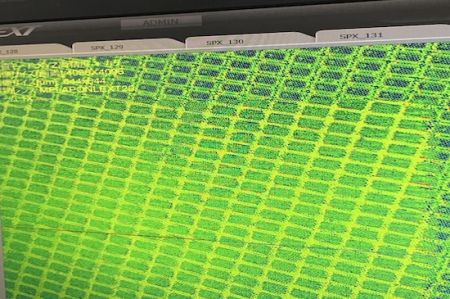
飛秒/皮秒 DUV 深紫外大功率激光雷射 - MicroLED 剝膠 Lift-off
在 Micro-LED 製程中,其中幾道能以雷射製程來進行,包含有 Micro-LED 藍寶石基板之轉貼到正反轉,再以高精度雷射來切割每一晶粒,接著進行深紫外雷射剝離各晶粒到面板上之移載製程,這三道雷射製程在...
細節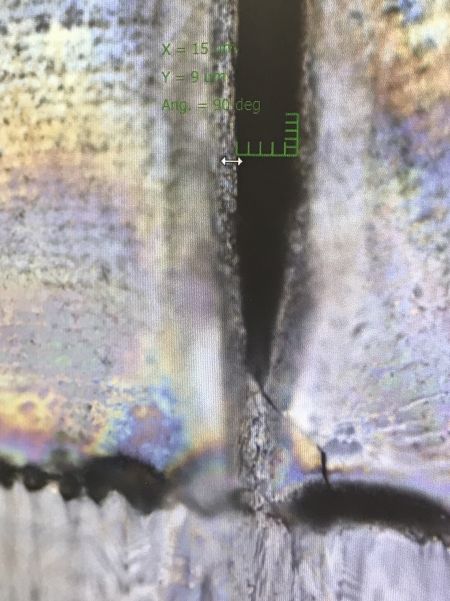
飛秒/皮秒 DUV 深紫外大功率激光雷射 - 高分子材料半切
膜材半切製程常於三明治結構多層膜材中進行,主要是切割到特定層來達成膜材撕離或貼合,這在雷射光學及製程開發中必須特別設計,整合並優化機電平台、聚焦光學、及控制方式來達成。
細節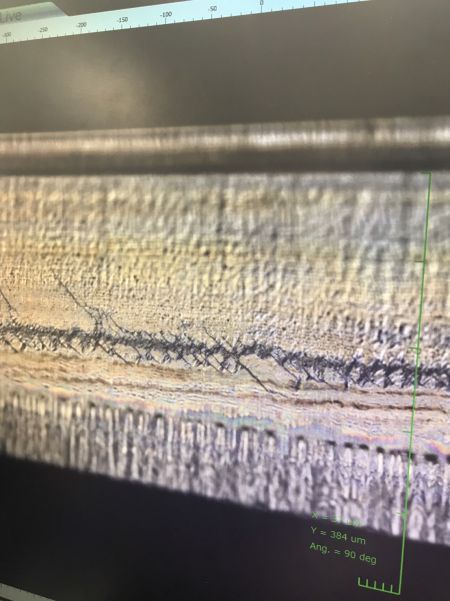
飛秒/皮秒 DUV 深紫外大功率激光雷射 - 薄片晶圓微切割
深紫外 DUV 波長雷射是以非常高光子能量來直接氣化解離加工材料,採用皮秒超快雷射具有冷加工特性,因此熱應力不會於材料切割過程中產生,此技術方案很適合用於切割薄片晶圓材料。
細節
飛秒/皮秒 DUV 深紫外大功率激光雷射 - 激光雷射開窗及電漿垂直切割矽晶圓 - 切穿
採用舊製程之直接雷切或隱切於厚片矽晶圓之後段封裝製程,皆會產生應力,或是產生粉塵,汙染表面。為解決上述問題,京碼推出新技術,其製程包含:(1)先將矽晶圓鍍上保護膜,如同遮蔽罩,再使用DUV...
細節