
薄膜之深紫外激光雷射微切割及微钻孔
薄膜材料是指厚度介于单原子到几毫米间的薄金属及有机物层,薄膜技术主要应用于半导体功率元件和光学镀膜。本案是利用薄膜厚度之特质,其切割尺寸具高稳定性,亦利用雷射冷加工之高精度特性,来精准定位,执行微切割及微钻孔。
细节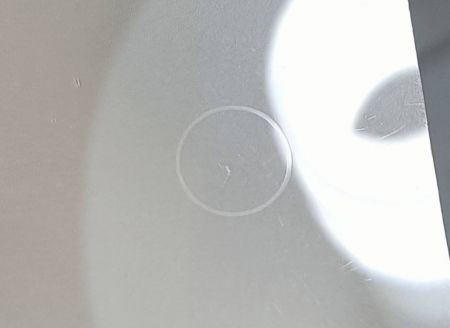
超快DUV 深紫外大功率激光雷射- 聚碳酸脂之冷加工微蚀刻
京碼利用其开发之DUV 雷射机台,成功于聚碳酸脂(PC材料)薄膜上雷射微蚀刻出线路,而不伤害材料。其他种雷射因会产生焦黑,而不适合用来于聚碳酸脂微蚀刻电路。
细节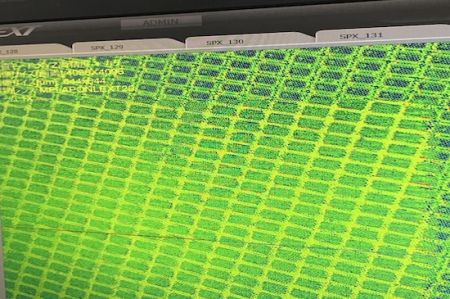
超快DUV 深紫外大功率激光雷射- MicroLED 剥胶Lift-off
在Micro-LED 制程中,其中几道能以雷射制程来进行,包含有Micro-LED 蓝宝石基板之转贴到正反转,再以高精度雷射来切割每一晶粒,接着进行深紫外雷射剥离各晶粒到面板上之移载制程,这三道雷射制程在Micro-LED...
细节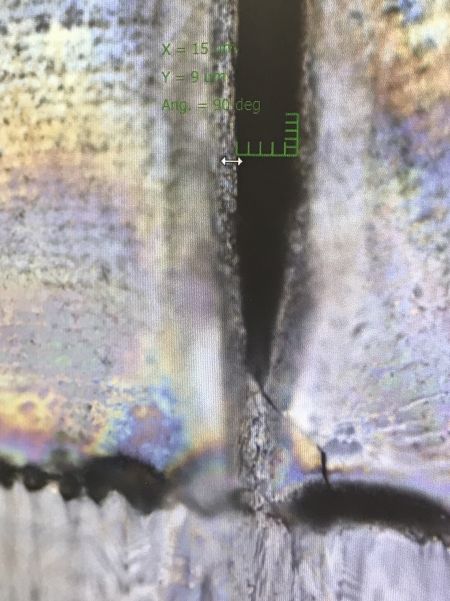
超快DUV 深紫外大功率激光雷射- 高分子材料半切
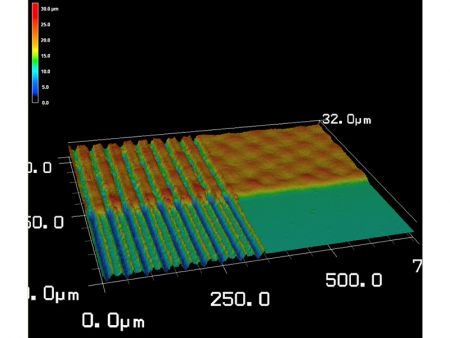
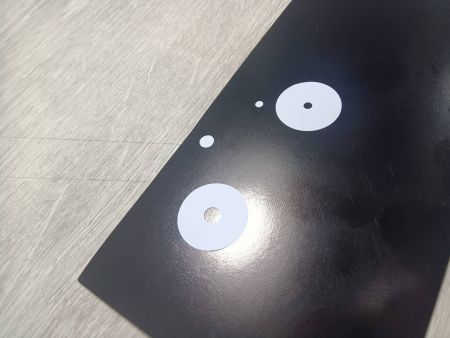
膜材半切制程常于三明治结构多层膜材中进行,主要是切割到特定层来达成膜材撕离或贴合,这在雷射光学及制程开发中必须特别设计,整合并优化机电平台、聚焦光学、及控制方式来达成。
细节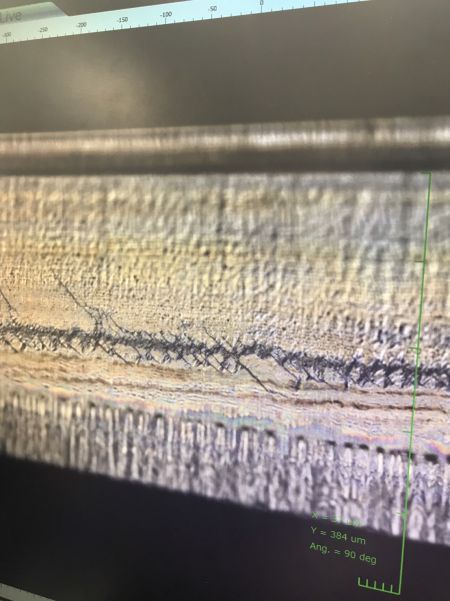
超快DUV 深紫外大功率激光雷射- 薄片晶圆微切割
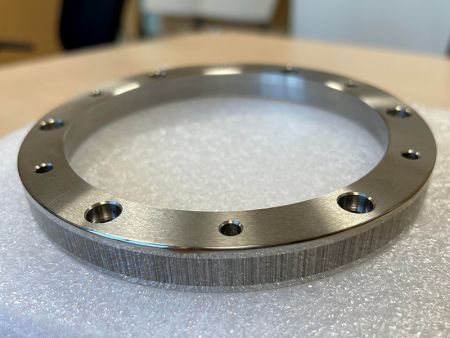
深紫外DUV 波长雷射是以非常高光子能量来直接气化解离加工材料,采用皮秒超快雷射具有冷加工特性,因此热应力不会于材料切割过程中产生,此技术方案很适合用于切割薄片晶圆材料。
细节
超快DUV 深紫外大功率激光雷射- 激光雷射开窗及电浆垂直切割矽晶圆- 切穿
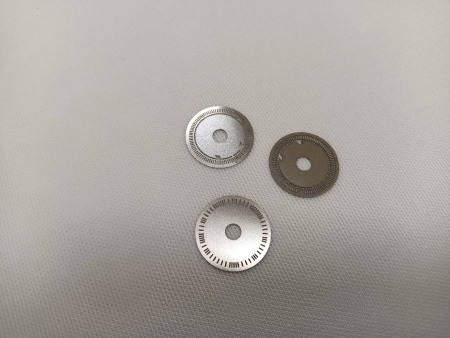
采用旧制程之直接雷切或隐切于厚片矽晶圆之后段封装制程,皆会产生应力,或是产生粉尘,污染表面。为解决上述问题,京碼推出新技术,其制程包含:(1)先将矽晶圆镀上保护膜,如同遮蔽罩,再使用DUV...
细节